


Por Manuel Cardona, docente de la Facultad de Ingeniería y coordinador de investigación UDB.
Existen millones de personas en el mundo con algún tipo de discapacidad física que necesitan de dispositivo o producto ortopédico que les faciliten la movilidad. El creciente avance científico está permitiendo el desarrollo de nuevas tecnologías como los exoesqueletos robóticos para mejorar la calidad de vida de estas personas.
Un exoesqueleto es un dispositivo electromecánico que usa una persona para ayudar a aumentar sus capacidades físicas, asistir en casos de discapacidades o ayudar en casos terapéuticos de rehabilitación. En el caso de los exoesqueletos robóticos para rehabilitación, se busca que estos dispositivos ayuden al paciente en la rehabilitación después de haber sufrido algún tipo de lesión muscular o nerviosa, o para ejercitar a la población mayor. La rehabilitación se logra a través de rutinas de entrenamiento previamente establecidas por un profesional.
Debido a que los sistemas robóticos constituyen una herramienta de trabajo muy valiosa para los fisioterapeutas y médicos traumatólogos, se pueden encontrar varios ejemplos de su uso en la rehabilitación de diferentes lesiones. Una importante ventaja que ofrecen los sistemas robotizados es su capacidad de ayudar a realizar terapias simples, repetitivas e intensivas, incluso sin la presencia física del terapeuta. Además, se ha demostrado a través de diferentes estudios, que el uso de exoesqueletos en procesos de rehabilitación genera resultados positivos. En síntesis, con el uso de exoesqueletos:
- El proceso de rehabilitación es más preciso.
- El proceso de rehabilitación es más rápido.
- Se reduce la carga de trabajo del fisioterapeuta.
- Se reducen los costos clínicos.
Algunos de los esfuerzos actuales se encaminan a crear dispositivos portátiles que puedan usarse en casa y en las actividades diarias. Otros se enfocan en la rehabilitación clínica u hospitalaria, principalmente para aquellos pacientes recién operados o con lesiones crónicas. Una de las características más útiles para los especialistas es la capacidad que se tiene con estos dispositivos de obtener datos de la terapia, lo que permite evaluar la evolución del paciente y tomar decisiones basándose en ello.
 Sin embargo, actualmente la rehabilitación se realiza uno a uno, es decir, un fisioterapeuta atiende a un paciente a la vez, por lo que los recursos humanos y materiales no son suficientes para cubrir la demanda actual. El aumento de lesiones músculo-esqueléticas, así como de los casos de accidentes cerebro vasculares tales como el Ictus, ha sido motivo de preocupación para varios organismos internacionales, como la Organización Mundial de la Salud (OMS), que en 2013 hizo un llamado para alertar a los gobiernos acerca de esta grave problemática.
Sin embargo, actualmente la rehabilitación se realiza uno a uno, es decir, un fisioterapeuta atiende a un paciente a la vez, por lo que los recursos humanos y materiales no son suficientes para cubrir la demanda actual. El aumento de lesiones músculo-esqueléticas, así como de los casos de accidentes cerebro vasculares tales como el Ictus, ha sido motivo de preocupación para varios organismos internacionales, como la Organización Mundial de la Salud (OMS), que en 2013 hizo un llamado para alertar a los gobiernos acerca de esta grave problemática.
Existe evidencia de que la rehabilitación es efectiva cuando es intensiva, repetitiva y el paciente se involucra plenamente en el proceso y la robótica puede ser una solución para ello. La rehabilitación uno a uno tiene limitaciones, como la demanda de un alto esfuerzo físico por parte del fisioterapeuta, que repercute en el desempeño de éste, y los altos costes asociados.
La rehabilitación asistida por robots puede ayudar a reducir las altas listas de espera que hay actualmente, al permitir que se atienda a más de un paciente a la vez, según el número de dispositivos disponibles, y la duración, así como el número de sesiones pueden incrementarse y ser controladas de manera efectiva, al igual que la evolución del paciente gracias a la obtención de distinta información proveniente de los sensores del sistema. También se puede motivar al paciente gracias al uso de tecnología, como realidad virtual o videojuegos.
Retos de la Robótica de Rehabilitación
La mayoría de los exoesqueletos son voluminosos y carecen de portabilidad, y por ello su objetivo es ubicarlos en clínicas u hospitales a los que acuden los pacientes para rehabilitación. Los principales problemas por los cuales no es posible conseguir la portabilidad es el tamaño de los motores que se requieren para otorgar los pares adecuados, el número de estos para conseguir que el dispositivo tenga más movilidad, el peso de la estructura y la fuente de voltaje que se necesita para alimentar a todo el sistema. Se puede observar que mientras más movilidad posee el dispositivo, más voluminoso es su tamaño. Por otra parte, la búsqueda de materiales livianos y baterías de mayor duración siguen siendo retos en el diseño de exoesqueletos.
Algunos de los requerimientos técnicos que se encuentran en los diseños de la mayoría de los exoesqueletos de rehabilitación toman en cuenta la ergonomía del sistema y la capacidad de adaptarse a varios y diferentes tipos de pacientes, ya sea por sexo, complexión, edad, etc. Otro importante requerimiento es que sean capaces de repetir una rutina que previamente ha realizado el terapeuta, pues es quien la diseña y adapta según la evolución del paciente. En muchos casos se pide también que el dispositivo sea capaz de recolectar y almacenar datos de la realización del movimiento, para que estos puedan ser estudiados por el terapeuta para determinar la evolución del paciente durante la rehabilitación.
Sin embargo, quizás el mayor reto que tiene el diseño y desarrollo de los exoesqueletos de rehabilitación es el cumplimiento de la normativa vigente para productos sanitarios, un punto aún pendiente en la mayoría de los dispositivos actuales. Su complejidad radica en requiere de tiempo, esfuerzo y recursos económicos para estudiarla e implementarla, con el fin de obtener la validación clínica del dispositivo.
En el caso de exoesqueletos de rehabilitación, se deben de tomar en cuenta los aspectos definidos en la norma ISO 8373:2012 para robots y dispositivos robóticos, la norma ISO 10218-1:2011 relacionada con los requerimientos de seguridad y la norma IEC 80601-2-78:2019 en la cual se tratan los requisitos particulares para la seguridad básica y el rendimiento esencial de los robots médicos para rehabilitación, evaluación, compensación o alivio.
Otro gran reto sigue siendo la reducción de los costos, en general, el precio de un exoesqueleto robótico de rehabilitación de miembro inferior (no estacionario) ronda entre $45,000 a $160,000, lo cual está por encima del limite de la mayoría de las personas.
El proyecto ALICE
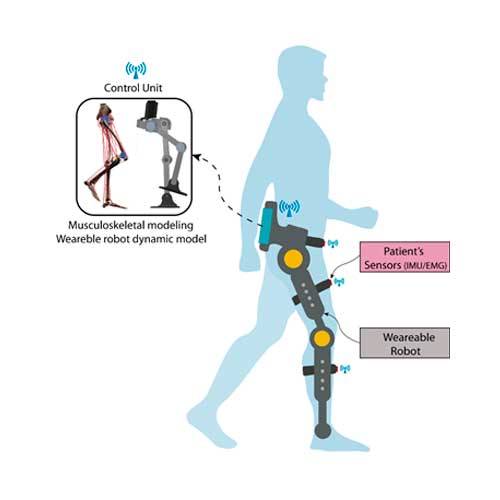
El proyecto ALICE (Assistive Lower-Limb Controlled Exoskeleton) consiste en el diseño y desarrollo de un exoesqueleto de rehabilitación, ALICE está siendo desarrollo en la Universidad Don Bosco e incluye tanto el diseño mecánico, electrónica, sistema de potencia, así como también el desarrollo de un simulador biomecánico.

ALICE incluye los datos de la cinemática y cinética del robot y del paciente para incluirlos en el lazo de control, convirtiendo a ALICE en un sensor utilizado para diagnóstico y cuantización efectiva del progreso de la terapia. Por otra parte, se incluye en el control el simulador biomecánico, resultando en una estrategia totalmente novedosa al presentar un controlador biomecánico-adaptativo lo cual permite personalizar la terapia de cada paciente.
Actualmente, ALICE se encuentra en un nivel TRL 5 (nivel de madurez tecnológica de la NASA) y el siguiente paso es alcanzar el TRL 6, donde el exoesqueleto será prototipado permitiendo a la vez validar el hardware, componentes ergonómicos, estrategias de control, etc.







