

Por Héctor Carías, docente investigador del Instituto de Investigación e Innovación en Electrónica UDB.
En esta ocasión hablaremos sobre la reparación de un robot móvil de exploración de tuberías, que sufrió daño en una pieza, en particular una tapa de la cámara, sin la cual el robot móvil no podía funcionar y no estaba disponible como repuesto por parte del fabricante.
Mostraremos cómo, desde el Laboratorio de Manufactura Integrada por Computadora Industrial (iCIM) de la UDB, hicimos uso de la célula de manufactura flexible y en particular el centro de maquinado CNC (Control Numérico por Computadora) para dar solución a este problema.
Conozcamos primero la célula de manufactura flexible, y esta se compone de dos segmentos (estación de alimentación al CNC de la empresa Festo y el Concept mill 105 de la empresa Emco). El primer segmento (2, 3, 4, 5, 6, y 7 en Fig. 1), sirve para la alimentación de la máquina de procesamiento y el segundo es el centro de maquinado CNC (1 en Fig. 1). La manipulación de la pieza de trabajo la realiza el robot Mitsubishi RV-2AJ (6 en Fig. 1) .
El robot está montado sobre un eje lineal (articulación prismática) (7 en Fig. 1), que expande el rango de operación del robot. Todas las posiciones necesarias pueden alcanzarse sin ningún problema, por medio de este eje lineal.
La materia prima está disponible en paletas con una placa base o de compartimentos en la estación. Después del procesamiento, las piezas se colocan en sus posiciones de origen. Cuatro recepciones para paletas están montadas en la placa de operación para la recepción de los palés (5 en Fig 1.).
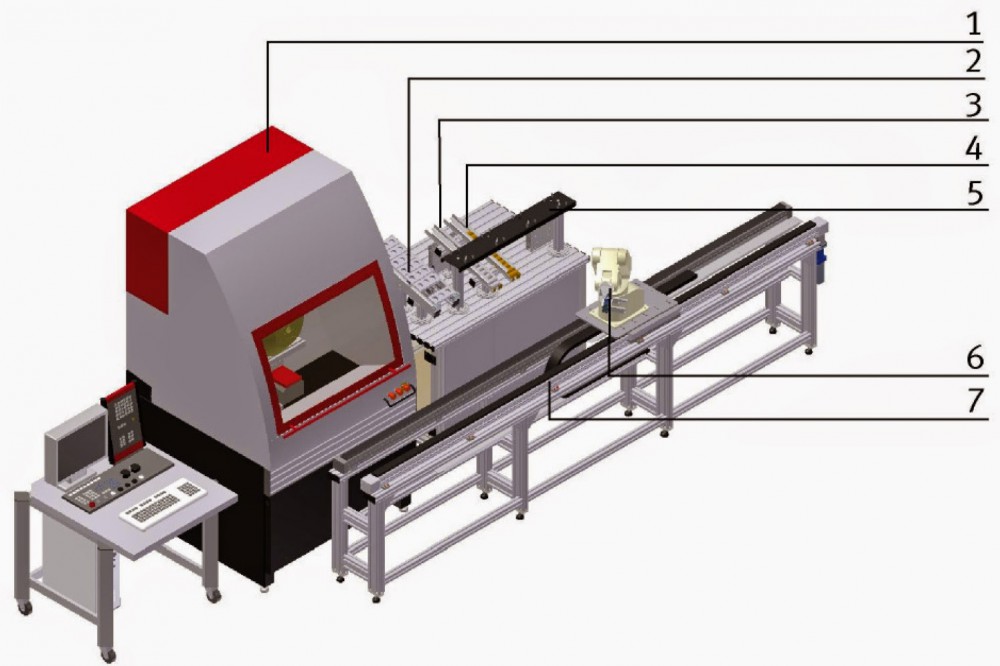
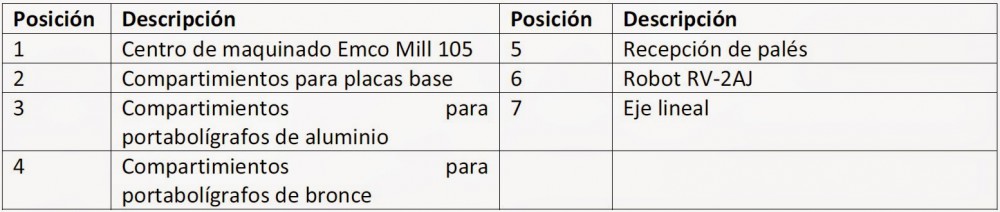 Figura 1. Información general de la estación de la célula de manufactura flexible.
Figura 1. Información general de la estación de la célula de manufactura flexible.
El centro de maquinado procesa las placas base (Fig 2).
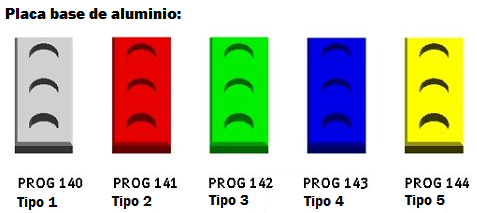
Figura 2. Tipos de placas base producidas por el centro de maquinado y su programa correspondiente.
El control lo realiza la unidad de accionamiento del robot (Fig. 2).
 Figura 3. Unidad de accionamiento CR1-571-S12.
Figura 3. Unidad de accionamiento CR1-571-S12.
Construyamos la pieza utilizando el centro de maquinado CNC
En este caso fabricamos una pieza que sirve de tapa a la cámara ORPHEUS Ex, dentro de ella se encuentra un sensor de posición, que utiliza un potenciómetro para saber en qué ángulo está la cámara cuando esta se encuentra dentro de una tubería de aguas lluvias, realizando una inspección.
La cámara trabaja con un gas inerte para evitar alguna explosión dentro de ambientes que tienen atmósferas propensas a ello, la tapa presentaba grietas y debido a ello la cámara no se presurizaba y por lo tanto todo el sistema no funcionaba.
Figura 4. Cámara ORPHEUS Ex.
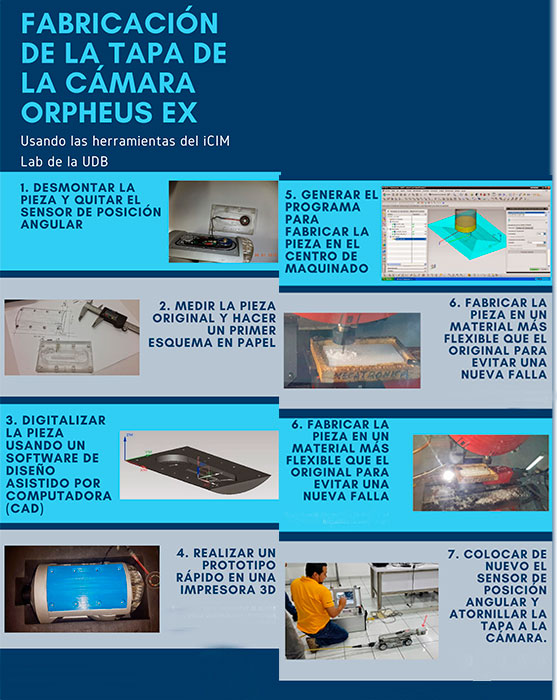
En la siguiente infografía notaremos el paso a paso empleado para fabricar la tapa de la cámara Orpheus Ex.
Con el equipo de profesionales y las herramientas del Instituto de Investigación e Innovación en Electrónica (IIIE) de la Universidad Don Bosco brindamos solución a los problemas que presentan las instituciones y empresas regionales, además los estudiantes tienen la oportunidad de poner en práctica sus conocimientos con estos desafíos.





